计算机视觉的发展历史:
动物进化出眼睛;生物视觉-》机器视觉-》照相机;
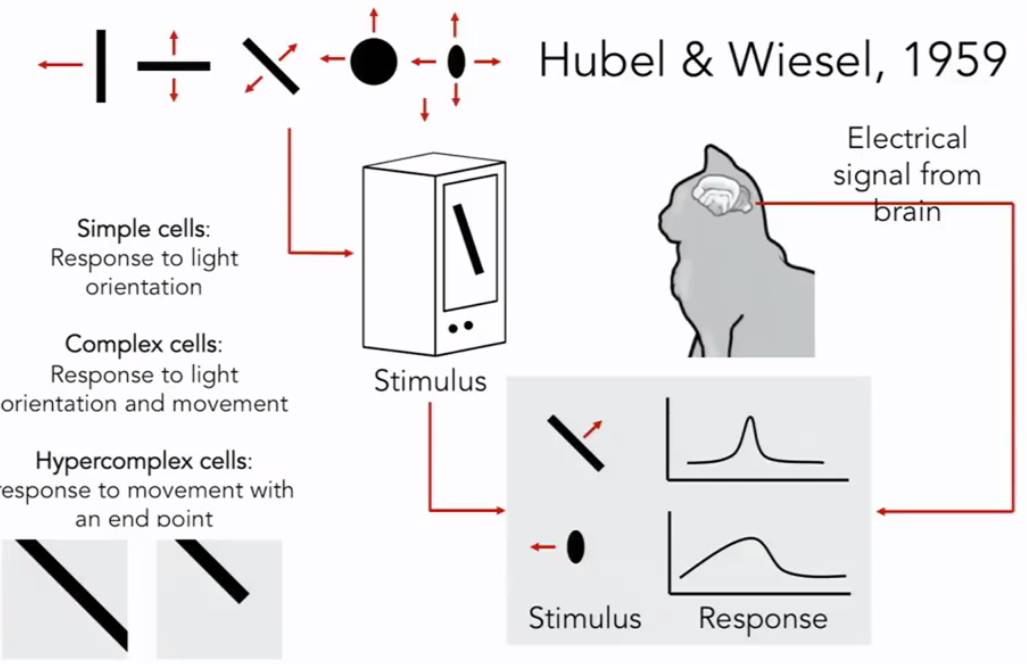
生物学家开始研究视觉的机理,Hubel & Wiesel,1959,他们的问题是:哺乳动物的视觉处理机制是怎样的呢?他们讲电极插进主要控制猫视觉的后脑上的初级视觉皮层,然后观察,何种刺激会引起视觉皮层神经元的反应。他们发现猫的大脑的初级视觉皮层有各种各样的细胞,其中最重要的细胞是当它们朝着某个特定的方向运动的时候,对面向边缘产生回应的细胞。当然还有更加复杂的细胞,但是总的来说,它们发现视觉初级是始于视觉世界的简单结构,面向边缘,沿着视觉处理途径的移动,信息也在变化,大脑建立了复杂的视觉信息,直到它可以识别更为复杂的视觉世界。
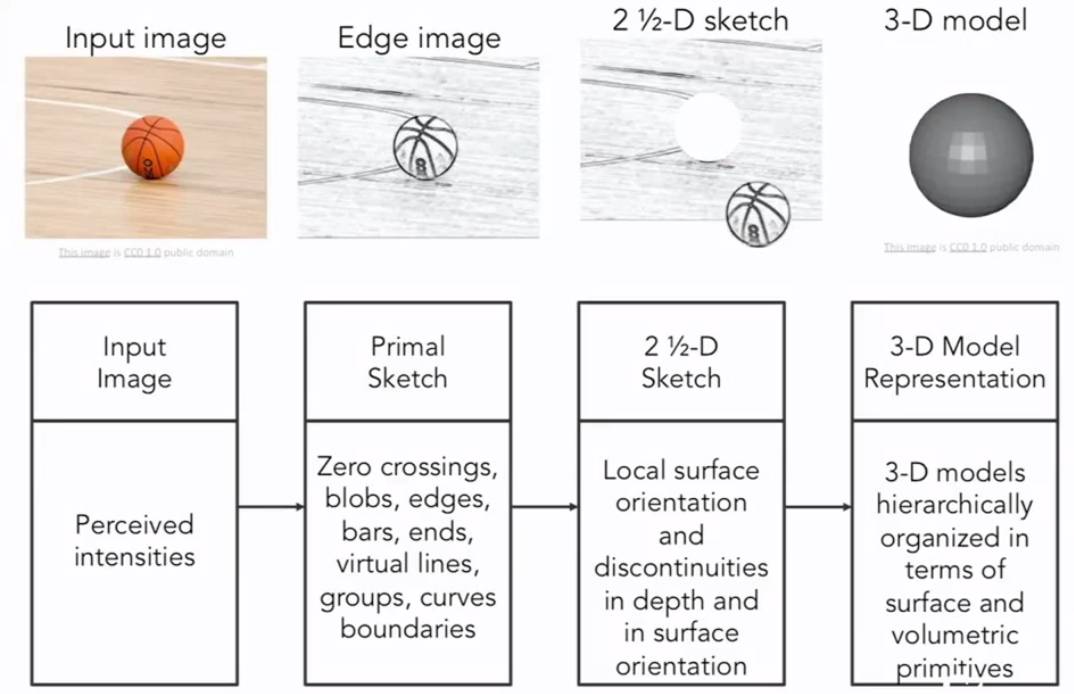
计算机视觉的历史是从60年代初开始的,Block World 是由Larry Roberts出版的一部作品,被广泛地称为计算机视觉的第一篇博士论文,其中视觉世界被简化为简单的额几何形状,目的是能够识别它们,重建这些形状是什么。1966年MIT的暑期视觉项目,目的是为了构建视觉系统的重要组成部分。David Marr,一个MIT 视觉科学家提出了使得计算机识别视觉世界的算法,他指出,为了获取视觉世界完整的3D图像,需要经历几个阶段:第一个阶段是原始草图,大部分边缘、端点和虚拟线条,这是受到了神经科学家的启发,Hubel &Wiesel 告诉我们视觉处理的早期阶段有很多关于像边缘的简单结构;第二阶段是David Marr 所说的“2.5维草图”我们开始将表面、深度信息、不同的层次以及视觉场景的不连续性拼凑在一起的;最后一个阶段是将所有的内容放在一起,组成一个3D模型。这是一个非常理想化的思想过程,这种思维方式实际上已经在计算机视觉领域影响了几十年。这也是一个非常直观的方式,并考虑如何解构视觉信息。
七十年代另外一个非常重要的工作(Brooks&Binford,1979 Fischler & Elschlager 1973),这个时候他们提出了一个问题,我们如何越过简单的块状世界,开始识别和表示现实世界的对象。70年代是一个没有数据可用的时代,计算机的速度很慢,计算机科学家开始思考如何识别和表示对象,在斯坦福大学的帕洛阿尔托以及斯里兰卡提出了类似的想法,一个被称为广义圆柱体,一个被称为圆形结构,他们的基本思想是每个对象都是由简单的几何图单位组成,任何一种表示的方法就是讲物体的复杂结构,简约成一个集合体,有更简单的形状和几何结构,这些研究已经影响了很长很长的一段时间。
80年代,David Lowe思考如何重建或者识别由简单的物体结构组成的视觉空间,他尝试识别剃须刀,通过先和边缘进行构建,其中大部分都是直线以及直线之间的组合。那个时候由于样本小,物体识别是很难的。
如果物体识别太难了,那么我们首先要做的是目标分割,这个任务就是把一张图片中的像素点归类到有意义的区域,我们可能不知道这些像素点组合到一起是一个人型,但是我们可以把这些属于这人的像素点从背景中抠出来,这个过程就叫做图像分割,这项工作是由Berkeley的 Jitendra Malik和他的学生Jianbo Shi 所完成的。他们用一个图论算法对图像进行分割,还有另外一个问题,先于其他计算机视觉问题有进展,也就是面部检测,脸部是人类最重要的部位之一。
1999-2000年机器学习技术,特别是统计机器学习方法,开始加速发展,出现了很多方法:支持向量机模型,boosting方法,图模型。有一种工作做出了很多贡献,技术使用AdaBoost 算法进行实时面部检测,由Paul Viola和Michal Jones 完成。在他们发表论文后的第五年,也就是2006年,富士康推出了第一个具有实时面部识别的照相机。这是从基础科学研究到实际应用的一个快速转化,关于如何才能能够做到更好的目标识别,这是一个我们可以继续研究的领域。从90年代末到2000年的前十年有一个非常有影响力的思想方法是基于特征的目标识别,这里有一个影响深远的工作,由 David Lowe完成,叫做SIFT特征,思路就是去匹配整个目标。例如这里有一个stop标识去匹配另外一个stop标识是非常困难的,因为有很多变化的因素,比如相机的角度、遮挡、视角、光线以及目标自身的内在变化,但是可以得到一些启发,通过观察目标的某些部分,某些特征是能够在变化中保持不变性,所以目标识别的首要任务是在目标上确认这些关键的特征,然后把这些特征与相似的特征进行匹配,它比匹配整个目标要容易得多。我们这个领域另外一些进展是识别整幅图的场景,有一个算法叫空间金字塔匹配,背后的思想是图片里面有各种特征,这些特征可以告诉我们这是哪种场景,到底是风景还是厨房,或者是高速公路等等 。这个算法从图片的各部分,各个像素抽取特征,并把他们放在一起,作为一个特征描述符,然后在特征描述符上做一个支持向量机。有个在人类认知方面很类似的工作正处于风头浪尖。有些工作是把这些特征放在一起之后,研究如果在实际图片中合理地设计人体姿态和辨认人体姿态,这方面一个工作被称为方向梯度直方图;另外一个被称为可变形部件模型。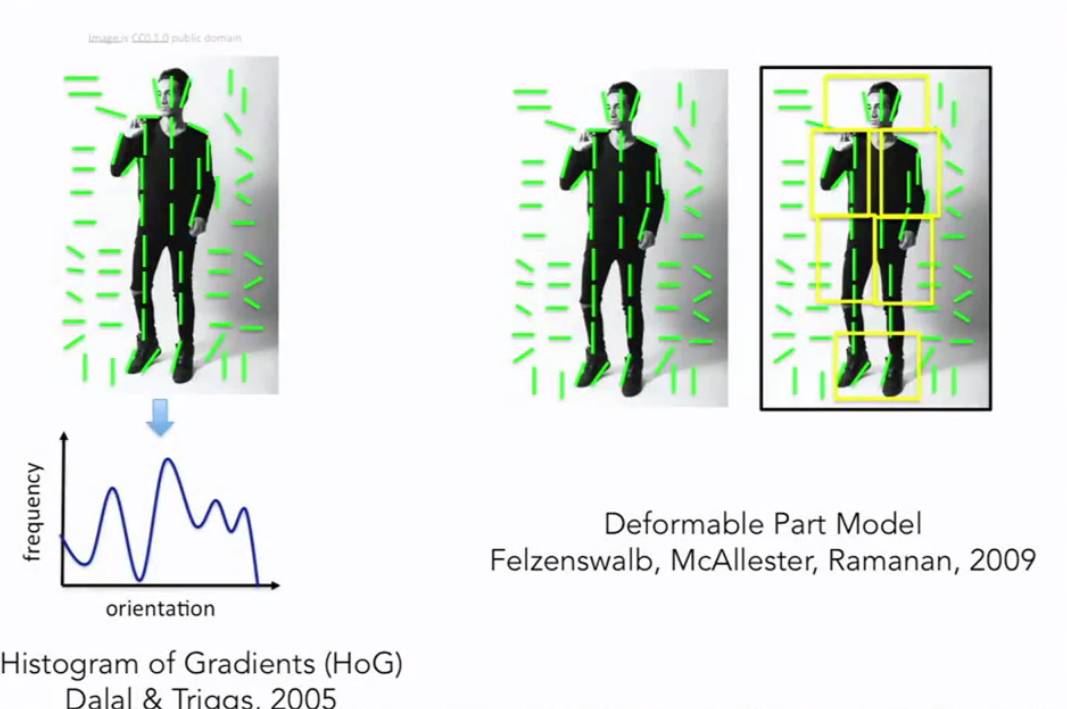
可以看到我们从60年代、70年代、80年代一步步走到20世纪,有一件事情一直在变化,就是图片的质量,随着互联网的发展,随着数码相机的发展,计算机视觉的研究也能拥有更好的数据了,计算机视觉在21世纪早期提出了一个非常重要的基本问题,我们一直在目标识别,但是直到21世纪的早期,我们才开始真正拥有标注的数据集,能供我们衡量在弥补识别方面取得的成果,其中最具有影响力的标记数据集之一叫PASCAL Visual Object Challenge 这个数据集由20个类别的图片,数据集中的每个种类都有成千上万张图片,
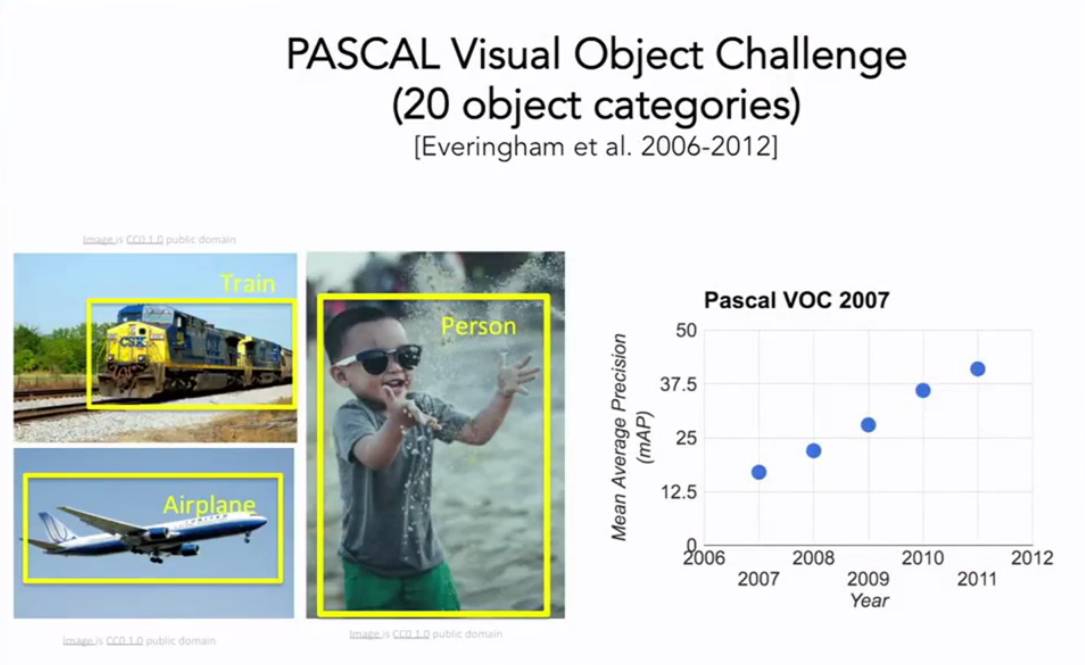
现场不同的团队开发算法来和数据测试集做对抗训练,来看有毛毛雨优化,这里有一张图表列举了从2007年到2012年在基准数据集上检测图像中的20中目标的检测效果,可以看到在稳步提升。在差不多时候,普林斯顿和斯坦福中的一批人开始,向我们或者说我们这个领域提出了一个更加困难的问题,我们是否具备了识别真实世界中的每一个舞台的能力,或者说大部分物体。这个问题是由机器学习中的一个现象驱动的,就是大部分的机器学习算法,无论是图模型,还是支持向量机或者是AdaBoost都可能会在训练过程中过拟合,部分原因是可视化的数据非常复杂,我们的模型的维数就很高,参数量就很大,输入是高维的模型,则还有一堆参数需要调优,当我们的训练数据量不够时,很快就产生了过拟合的现象,这样我们就无法很好地泛化,因此即使有两方面的动力,一是我们单纯地想识别自然世界中的万物,二是要回归机器学习克服机器学习中的瓶颈问题,过拟合问题。 LIfeifei开展了一个叫ImageNet的项目,汇集所有能够找到的图片,包含世界万物,组建一个尽可能大的数据集,用一个称为WorldNet的字典来排序,这个字典里有上万个物体类别,用亚马逊土耳其机器人平台进行排序清洗数据,给每张图片打上标签,最终的结果是一个ImageNet,最后由将近500万甚至4000万多的图片,分成22000类的舞台或者场景,这是一个巨大的,很有可能是由当时AI领域最大的数据集,它将目标检测算法的发展推到了一个新的高度。从2009年开始,ImageNet团队组织了一场国际比赛,叫做ImageNet大规模视觉识别竞赛,这是一个筛选更严格的测试集,总共140万的目标图像有1000种目标类别,分别识别来测试计算机视觉算法。2012年卷积神经网络算法击败了所有其他的算法。CNN模型展现了强大的能量。





 客服1
客服1
 官方群
官方群